
摘 要:随着农业航空应用的发展,植保无人机应用越来越普遍,由于农业户外环境出现了越来越多的电磁干扰源,对植保无人机的安全作业提出了更高的要求.为提高植保无人机飞行作业的安全性,引入了无人机抗电磁干扰技术.通过分析国内植保无人机作业可能面临的复杂环境,着重探讨了植保无人机抗高压线电磁干扰的问题,并仿真研究了植保无人机在高压输电线下的安全距离,展望了植保无人机抗电磁干扰技术的研究方向和研究重点.该文可为植保无人机抗电磁干扰技术的研究和应用提供一定参考.
关键词:植保无人机; 抗电磁干扰; 高压输电线; 展望;
作者简介: 兰玉彬(1961-),男,吉林农安人,教授,博士生导师,(E-mail)ylan@scau.edu.cn.; *漆海霞(1969-),女,湖南醴陵人,副教授,硕士生导师,(E-mail)qihaixia_scau@126.com.;
基金: 广东省引进领军人才项目(2016LJ06G689); 广东省科技项目(2017B010117010); 广东省科技计划项目(2019B020214003);
Discussion on Anti-electromagnetic Interference Technology of the Plant Protection UAV
Abstract:With the development of agricultural aviation applications, the application of the plant protection UAV is becoming more and more popular. Due to the increasing number of electromagnetic interference sources in the agricultural outdoor environment, higher requirements are imposed on the safe operation of the plant protection UAV. In order to improve the safety of flight operations of the plant protection UAV, the anti-electromagnetic interference technology of UAV was introduced. By analyzing the complex environment that the domestic plant protection UAV may face, the paper discusses the problem of electromagnetic interference of the plant protection UAV against high-voltage lines, and simulates the safety distance of the plant protection UAV under high-voltage transmission lines. At last, research direction and research focus of machine anti-electromagnetic interference technology are prospected. This paper can provide some reference for the research and application of the plant protection UAV anti-electromagnetic interference technology.
Keyword:plant protection UAV; anti-electromagnetic interference; high-voltage transmission line; prospect;
0 引言
随着农业航空技术的发展,植保无人机的大规模应用已经成为一种趋势[1].植保无人机克服了传统植保机械的弊端,可改善农业病虫草害化学防除带来的弊端,提高农业抗风险能力.研究表明:植保无人机在喷施效率和喷施安全性方面具有很大的优势,与传统的人工喷施方式相比,植保无人机喷施雾滴的沉积效果好、成本低,作业效率是人工喷施方式的10余倍[2].
植保无人机作业时,有时会遇到低矮的高压输电线及架设在田间的通信基站等电磁干扰源,高压输电线产生的强电磁场、通信基站发出的无线电信号都可能导致植保无人机失控或者坠毁,严重影响了田间植保作业的安全性.如何保证植保无人机在靠近电磁干扰源,特别是靠近高压输电线路时仍能正常作业,是件极有价值的事情.
2018年6月1日,我国颁布实施的首个植保无人机国家标准《NY/T 3213-2018植保无人飞机质量技术评价规范》,针对田间工况通讯系统信号易干扰的问题,规定了植保无人机参考的电磁兼容性[3],而现阶段学者对植保无人机抗电磁干扰的评定及研究鲜有报道.为此,从无人机的电磁防护、余度飞行控制系统、组合导航系统和数据链4方面出发,结合植保无人机的复杂作业环境,对植保无人机抗电磁干扰技术的未来发展趋势进行讨论.
1 无人机抗电磁干扰技术的研究现状
电磁干扰(简称 EMI)并非新问题,是电子电气设备固有的问题[4].电磁干扰本身已经成熟,也有规范,而无人机领域属于特定环境.无人机复杂的电子系统极易受到干扰破坏,尽管前人在无人机抗电磁干扰方面做了大量研究,也取得了一定进展,但依然存在不能有效地应对复杂飞行环境的问题.
1.1 无人机电磁防护研究现状
无人机电磁防护主要通过部件防护和部件布置两种方法实现[5].整体而言,电磁防护成本较低、见效较快,故在防干扰设计上受到各方的青睐.
卢育中仿真研究了电磁干扰对无人机机身孔缝的耦合效应,并基于传统的屏蔽、滤波、接地方法,提出了无人机的电磁防护方案[6].郑生全等针对天线耦合和电路中敏感器件的电磁脉冲干扰,提出了几种新的电磁脉冲保护方法,并论述了电磁脉冲场电路的敏感系统设计的整体保护[7].程二威等仿真分析了无人机壳体的屏蔽效能,提出了一种基于频率搅拌混响室的试验测试方法,为无人机电磁防护的定量分析提供参考[8].Wang等研究了复合材料的无人机航电系统,对影响航电系统电磁兼容性的静电-放电保护、复合材料的结合,以及布局与布线进行了优化讨论[9].李鸿祥对无人机辐射骚扰、辐射抗扰度的检验进行了较系统的研究,可为无人机的相关检验方法和限值规定的制定提供参考[10].此外,电力巡检无人机在电磁防护方面也做得比较好,如北京中飞艾维航空科技有限公司推出的固定翼FE-300 无人机和多旋翼RX-600无人机,机身采用蜂窝复合材质,整机结构强度高、质量轻,可近距离靠近高压输电线作业[11].
传统无人机电磁防护的研究主要集中在军用无人机上,技术比较成熟但大都比较机密,且以金属为代表的屏蔽材料制造,体积大、质量大、成本高,不适合无人机轻质飞行的需求,因此新材料、新结构的研发是当前亟需解决的关键和难点问题.目前,高校及科研单位对电磁防护的研究主要还是通过传统的防护办法进行综合防护,研究手段比较单一,大多只是简单通过仿真建模进行验证,并没有进行具体的试验分析论证.
1.2 无人机余度飞行控制系统研究现状
多余度飞行控制系统,即通过配置多套可同时运行、互为备用的飞控系统,从而降低系统受到电磁干扰出错的几率,有效提高了系统的稳定性[12].
1.2.1 余度飞控计算机技术
国外对无人机余度飞控计算机技术的研究已经成熟,比较典型的有美国 "全球鹰"(Global Hawk)无人机,其配备的双余度飞控计算机同时工作于热电状态,极大提高了系统的稳定性,是目前最著名的高空长航时无人机之一[13].国内对无人机余度飞控计算机技术的研究起步虽晚,但也取得了一定的成果.西北工业大学开发的基于PC104和Vxworks的三余度飞控计算机[14,15],可利用通信通道进行数据的比较计算,并以三取二原则,选择最佳线路输出;设计的一种无人机容错飞控系统构架,对传感器子系统、飞控计算机子系统和伺服子系统三大组成部分进行了冗余设计,并探讨了飞控系统的故障诊断与容错控制[16];开发的一种基于微小型无人机的双冗余飞控系统,融合了硬件冗余和软件容错技术,有效地提高了系统可靠性和安全性[17,18].南京航空航天大学在余度飞控计算机技术方面也有着比较深入的研究,包括对余度飞控系统架构、余度同步管理算法、数据交叉通信链路,以及故障检测与容错控制的研究,并完成了余度飞控系统的软硬件开发[19,20,21,22];开发的一款基于FlexRay总线的三余度飞控计算机成功地应用到无人机上[23].
1.2.2 传感器冗余技术
传感器冗余技术主要包括硬件冗余和解析冗余技术.早期的无人机多在硬件设计上进行冗余配置,但受传感器数目、体积、质量和成本等因素的限制,硬件冗余技术很难再进一步提升传感器系统的可靠性[24].国内外研究人员基于观测器、卡尔曼滤波器、等价空间法、参数估计法、神经网络和模糊控制等方法对传感器解析冗余技术进行了大量的研究.Heredia等提出了一种基于观测器/卡尔曼滤波器的无人机传感器故障检测方法,并通过了小型无人直升机的飞行测试,该方法不需要对系统矩阵及测量和处理的噪声协方差矩阵进行估计[25].D'Amato等研究了一种基于无迹卡尔曼滤波器(UKF)的故障检测、故障隔离和故障后系统重构的方法,可以替代三余度设计的标准硬件架构方案[26].Vitanov等实现了无人机陀螺仪和加速度计的故障检测和故障隔离,发现与增强扩展卡尔曼滤波器(EKF)相比具有一定的竞争力,其滤波产生的故障残差更平滑、更有规律[27].Gururajan等为解决某型无人机的传感器失效问题,设计了两种基于神经网络的传感器解析冗余方法,并对以上方法的未来应用进行了评估[28].池程芝等提出了一种序贯概率比的改进检测算法,利用故障警告延迟和相似信息交互的方法可实现故障传感器的快速隔离,进一步满足了实际生产的需求[29].包国宁基于扩展卡尔曼滤波(EKF)设计了不同传感器的信息融合和故障检测算法[30].此外,北京零度智控智能科技有限公司(ZEROTECH)开发的双子星飞控系统集成了两套独立传感器,可自动无缝切换[31];深圳大疆创新科技有限公司(DJI)开发的A3 PRO飞控系统集成了3套IMU和GNSS传感器模块,通过配合软件的解析余度可实现6路冗余定位导航[32].
1.2.3 存在的问题
余度飞控系统大多基于传统的传感器系统,因而存在体积大、质量大、成本高的问题,并不适用于多旋翼无人机平台.整体配置上,余度飞控系统集成了大量相同或者不同的传感器,如何科学配置相同的传感器才能发挥出它们最大限度的容错能力、如何巧妙利用不同传感器的解析冗余能力进一步为余度飞控系统提供更安全和更可靠的传感器输入信号,以及如何在保证算法的可靠性前提下降低计算的复杂度等,都是余度飞控系统需要解决的问题.
1.3 无人机组合导航系统研究现状
1.3.1 组合导航方式
目前已开发的导航系统包括全球卫星导航、惯性导航、无线电导航、多普勒导航、天文导航、图形匹配导航,以及地磁导航等[33],本节主要介绍前3种比较常用的导航方式.
全球卫星导航系统由一系列卫星进行定位导航,是目前发展最迅速的导航系统,主要包括美国的GPS系统、欧洲的GALILEO系统、俄罗斯GLONASS系统,以及中国的北斗系统(BDS).其中,美国的GPS应用最成熟、也最广泛.全球卫星导航具有全球性、全天候作业、高精度和低成本、无时间累积误差及实时性较好的优点,但容易受到干扰和控制.惯性导航系统不依赖于外部环境就能自行导航,具有自主性强、隐蔽性好、短时间内精度较高、可全天候工作的独特优点,但存在误差随时间积累的缺点.无线电导航系统一般包括机载设备和地面设备,利用无线电电波的传播特性进行定位和导航,具有不受时间和天气限制、精度较高、可靠性较好及设备简单等优点,但容易暴露目标、受人工干扰且必须与外设的地面台站配合[34].
每种导航系统都有其针对性的解决优势及存在的不足,实际应用也往往通过取长补短的方式将两种以上的导航系统进行组合,以提高导航系统的整体精度和可靠性.常见的组合导航系统有GPS/INS、BDS/INS及GPS/DR等.其中,GPS/INS组合导航系统应用最成熟,也最广泛,目前导航信息精度要求较高的设备一般都配有GPS/INS组合导航系统.
1.3.2 组合导航信息融合技术
常用的组合导航信息融合方法主要包括卡尔曼滤波(KF)、扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)、粒子滤波(PF)及自适应卡尔曼滤波(AKF)5种基本算法[35],每种算法都有其针对性解决优势及存在的不足,要结合具体工程环境进行方法选定.
Liang等提出了一种用于组合导航的容错联邦卡尔曼滤波器,并对某型无人机组合导航系统进行仿真,结果表明:提出的容错联合卡尔曼滤波器在故障存在的情况下仍能提供准确可靠的导航结果[36].Liu等针对MIMU/GNSS紧组合的惯性导航系统,提出了一种协方差整形自适应滤波方法和具有"位置信道""速度信道"双通道并行的滤波体系结构,经半实物仿真试验证明,系统精度约提高了32.6%;同时,当距离测量噪声变化剧烈时,自适应滤波器依然可以保持较好稳定性[37].Yang等分析了卡尔曼滤波器的解耦过程,提出了一种解耦卡尔曼算法,仿真结果证明该算法能在不改变高维滤波精度的前提下节省时间,对于无人机导航系统性能的提高具有重要意义[38].侯俊等提出了一种结合Sage-Husa滤波和无迹卡尔曼滤波(UKF)的融合算法,首先通过Sage滤波原理获取观测残差和新息的协方差矩阵,然后通过随机加权自适应因子对观测残差和信息进行加权调节,最后进行协方差矩阵的自适应随机加权估计,提高了组合导航的精度[39].Zhou等为了补偿GPS/INS组合导航系统中由于GPS信号微弱或中断而出现故障或失控的问题,提出了一种结合卡尔曼滤波和BP神经网络的导航方法,该方法采用卡尔曼滤波算法融合GPS和INS数据,将GPS和INS数据同时输入BPNN进行在线训练;在GPS拒绝导航的情况下,可以使用训练有素的BPNN作为GPS的替代,以保证导航的精度,使无人机能够持续导航[40].唐泽亮提出了一种基于自适应卡尔曼滤波(AKF)的GPS/INS模糊组合导航算法,可根据GPS的数据可信度进行加权计算,并利用模糊逻辑算法分配GPS的导航权重,有效提高了导航系统的抗电磁干扰能力[41].Zhai等针对高压输电线路周围的电磁场会影响无人机磁力计航向的问题,提出了一种基于双天线的无人机航向计算新方法,并通过对比实验,证明双天线可以替代磁力计测量航向且不受磁场干扰[42].Consoli等创新性地介绍了一种利用多天线进行无人机姿态确定的方法,为导航系统抗电磁干扰提供了新思路[43].
1.3.3 存在的问题
组合导航系统复杂,提出的新理论很难应用到实际中.新理论新方法的出现为无人机导航提供更多的选择,然而如何满足无人机低成本、微小型、轻质量的需要是复杂组合导航系统应用的难题;其次,辅助导航系统也给无人机导航系统增加负担,如何实现多重测量单元的信息同步和融合也是组合导航技术的难点.
1.4 无人机数据链抗干扰研究现状
地面操作人员跟无人机空中平台保持实时的联系、无人机空中平台将结果传送回地面站都需要通过数据链,包括地面的远程遥控遥测以及任务载荷的双向链路[44].
为测试无人机数据链在复杂电磁环境中的抗干扰能力,GUO等提出了一种模拟室内无线环境的动态电磁干扰的方法,可以实现接近真实场动态的模拟室内无人机数据链路的电磁干扰信号[45].张冬晓等通过对无人机连续波辐射效应的研究,得到了造成无人机数据链路通信失效的频率和灵敏度阈值,并通过电磁仿真和注射法分析了无人机数据链路的失效机理[46].Chen等提出了一种测试无人机对人为电磁干扰敏感性的方法,并给出结论:当人为电磁干扰波的频率接近无人机数据链路的频率时,连续辐射电磁干扰波可以中断无人机的数据链路[47].现阶段民用无人机采用无线电技术进行定位、遥控、图像传输,容易受到同频干扰.对于四轴无人机信号频段2.4G、5.8G比较常用,遇到信号干扰时,一般的处理方法是采用跳频扩频技术避免出现同频现象,也可以采用多输入多输出技术提高收发端的信号从而增强数据链的抗干扰能力[48].
由于数据链性能检测的试验周期长,试验数据提取困难且成本很高,因此对于一般的无人机只研究某条数据链的频率从而判定环境周围是否存在频段干扰.
2 植保无人机复杂的作业环境
2.1 植保无人机飞行高度多样
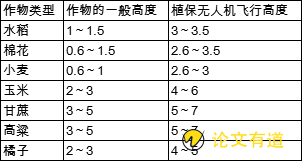
目前,植保无人机的应用几乎覆盖了全部农作物[49],包括水稻、小麦、棉花等低秆作物,玉米、甘蔗、高粱等高秆作物,橘子、香蕉、苹果、桃、枣、槟榔等果树,还包括对部分森林地区的防护,所以植保无人机作业的飞行高度差别很大.华南农业大学、中国农业科学院棉花研究所、吉林省农业机械研究院、河南省农业科学院等单位利用不同型号的植保无人机对常见的几种农作物进行飞防试验,分别得出如下推荐的作业高度:水稻1.5m,棉花0.5~2m,小麦1.5~2m,玉米2m[40,41,42,43,44,45,46,47,48,49,50,51,52,53].国内首个植保无人机国家标准《NY/T3213-2018植保无人飞机质量技术评价规范》明确规定:若制造商未给出最佳作业高度,则以2m作业高度进行喷施.结合以上情况,下面以2m为标准,将典型的低秆作物、高秆作物、果树、森林环境下植保无人机的飞行高度进行列表,如表1所示.
表1 植保无人机的各种飞行高度
Table 1 Various flight heights of the plant protection UAV
续表1
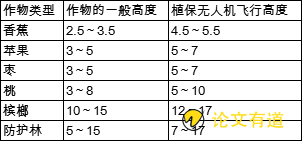
由表1可以看出:植保无人机对一般低秆作物作业的飞行高度为2~4m,此时飞行比较安全;对高秆作物作业的飞行高度为4~7m,田间主要电磁干扰源为高压输电线,此时需要注意作业区域附近存在的低矮高压输电线;对果树、森林作业的飞行高度最高可达17m,此时需要仔细观察作业区域附近是否存在高压输电线.
2.2 高压输电线电压等级多样
农村电网指主要为农、林、牧、副、渔的各类用户供电的110kV(220kV)及以下各级配电网,一般农村农田的高压输电线电压等级为35kV和10kV,东北农村有66kV,少数城镇化程度高的农村地区采用110kV(220kV)[54].农网高压线一般架设得比较低,特别是交通不发达和少人居住的地方,在这些地方进行飞防植保往往比较危险.另外,由于国家"西电东送"政策,在西北、华北地区的农田、山脉上存在经过的超高压(330~750kV)、特高压(1000kV级以上交流或±800kV及以上直流电)输电线.考虑到750kV及以上的电压等级高压输电线不常见,而且架设高度很高,因此笔者只研究500kV及以下电压等级高压输电线路与地面间的最小距离(在最大计算导线弧垂情况下),并将其列表,如表2所示[55,56].
表2 架空高压输电导线与地面间的最小距离
Table 2 Minimum distance between overhead high-voltage transmission lines and the ground
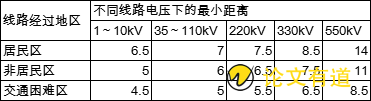
由表2可以看出:农村电网部分地区的高压输电导线的架设安全高度较低,在非居民区和交通困难区,高压输电线与地面的最小距离在4~6.5m.结合表1,如果此时在高压输电线下种植高秆作物或者果树,甚至是栽种防护林,那么采用植保无人机作业将面临较强的电磁干扰,影响了无人机植保作业的安全性.非居民区和交通困难区架设的超高压输电线最小高度在5.5~11.5m,结合表1,如果在超高压输电线下栽种果树、防护林,此时植保无人机靠近高压输电线作业也将面临危险.尽管电力部门规定,如果必须在已架设高压输电线保护区内种植农作物或者树木,需征得同意后,方可种植低矮农作物或树种,且必须要保持植物自然生长的最终高度和高压输电线之间的安全距离.但是,农民往往在这方面缺乏认识,也由于自身利益的关系,近年来"树线矛盾"依然呈上升趋势.
3 高压输电线下安全距离的仿真分析
户外高压输电线路的电压等级和架设高度差别很大,因此对植保无人机的影响也不一样.考虑植保无人机可能受到的最大电磁场强度的影响,把最小安全距离当作各电压等级高压输电线的架设高度,并设定高压输电线路的排列方式为单回三相水平排列.
以常规500kV高压输电线为例,建立如图1所示的输电线路横截面仿真简化模型.设定参数为:水平排列;相间距10m;距地高度11m;四分裂导线,单根导线半径10.8 mm;电流1154A.
为便于计算,需要对高压输电线路进行理想化处理:将工频电磁场视为准静态场;将大地视为良导体,电位为0;将分裂导线视为等效半径大小的圆柱导线来计算;将避雷线视为接地良好,忽略其对模型的影响;将导线视为无限长且直平行于地面的光滑圆导体,导线表面为等位面;忽略临近物体的影响,忽略弧垂影响.模型理想化后,输电线路导线周围电磁场问题转化为二维交变电磁场计算问题[57].
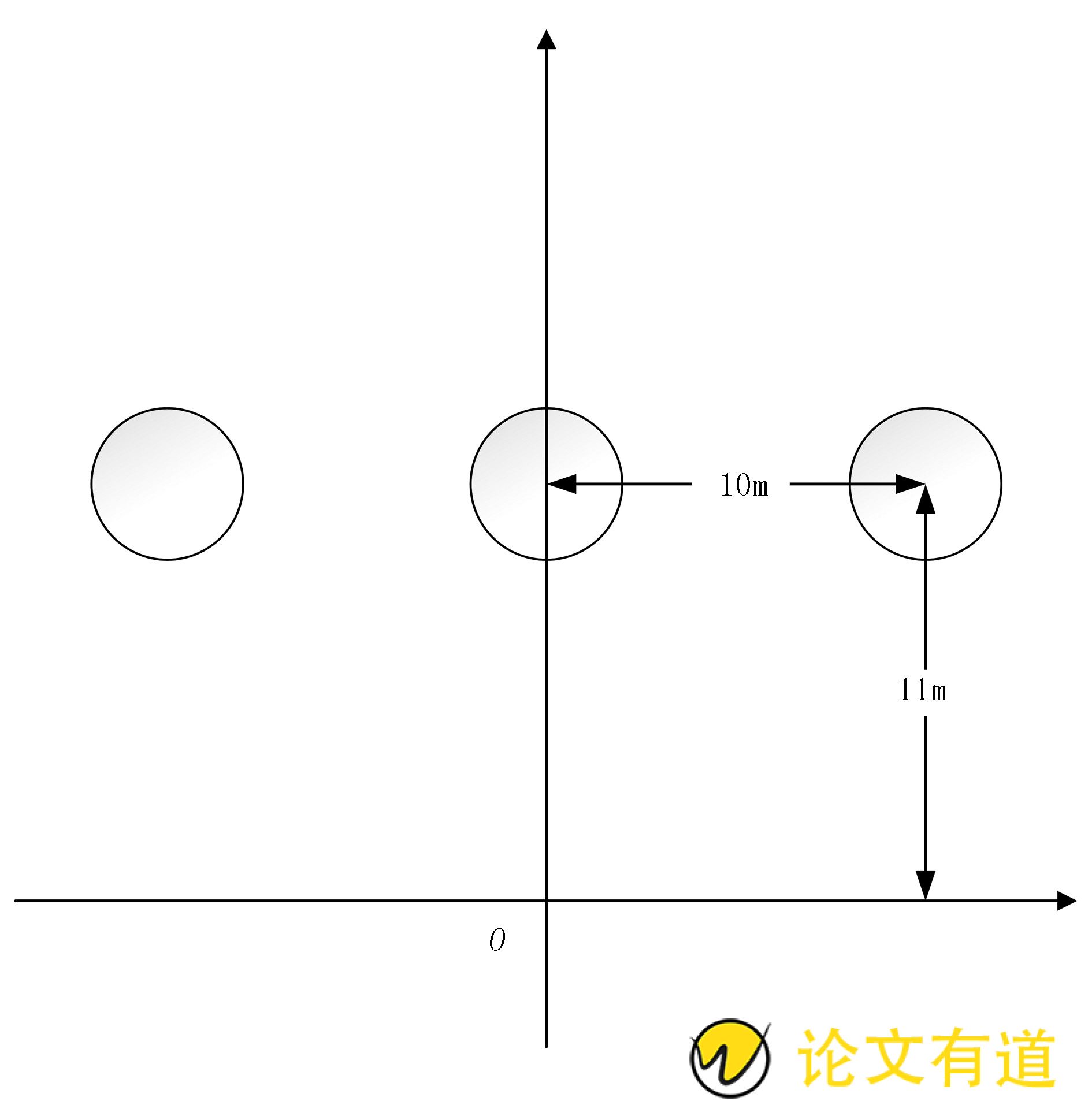
图1 仿真简化模型
Fig.1 Simplified model of simulation
采用模拟电荷法、模拟电流法研究高压输电线路模型[58],并在MatLab R2014a软件上编写程序进行仿真,得到500kV高压输电线附近的工频电磁场分布,如图2所示.
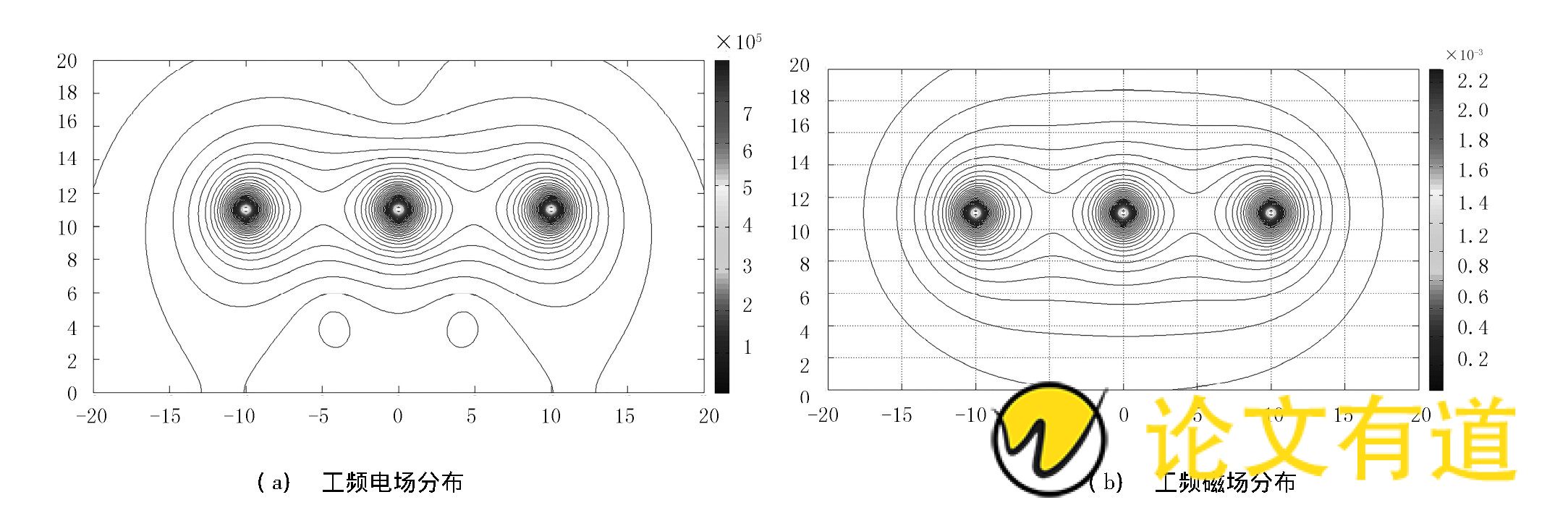
图2 工频电磁场分布
Fig.2 Power frequency electromagnetic field distribution
由图2(a)可以看出:相同高度的空间工频电场强度在中间相输电线路的两侧呈对称分布,高度由地表逐渐升高,电场强度先由小逐渐增大,在高度为输电线路水平高度处电场强度达到最大值.在大地横坐标及高度坐标所映射的A、B、C3条输电线路位置处电场强度值的变化速度分别达到极大值,且在B相输电线路处达到最大值.输电导线附近产生的电场按等位线分布,所以根据计算模型只要知道电场强度就能推算出对应的距离等位线.图2(b)输电电路附近工频磁场的分布跟电场分布类似.根据高压输电线路附近的分布情况,只要知道某型植保无人机的电磁场阈值就能求出其在高压输电线下的安全距离.
4 植保无人机抗电磁干扰技术展望
植保无人机属于特殊用途无人机,跟一般的航拍娱乐无人机相比,需要满足高强度、长时间及大负荷的设计要求.目前,国内植保无人机做得比较好的企业,机壳一般采用复合碳纤维材料、飞控进行传感器冗余设计、组合导航主要采用RTK测向技术和GPS/INS导航系统,以及数据链采用2.4G和5.8G通信,使得植保无人机的整体性能大大提高.但是,不同厂家生产的植保无人机水平差别很大,且植保无人机还可能搭载其他的任务载荷,因此进一步研究植保无人机抗电磁干扰技术尤为重要.
4.1 实时电磁环境检测技术
研究植保无人机抗电磁干扰问题,最重要的是识别环境中的电磁干扰源,知道电磁干扰源的类型和强度然后再做进一步的防护或者避开,以降低成本.现实植保作业中,往往是存在电磁干扰源也能正常飞行,但一次飞行遇到强电磁干扰又可能导致植保无人机完全失去正常作业的功能.因此,植保无人机在电磁干扰源附近作业时,很有必要搭载跟地面站实时的电磁场检测装置,而且当环境电磁场达到一定强度时能做出相应的动作,如避开或者重新规划一条作业路线,避免植保无人机受到过大的干扰失控或炸机.
4.2 智能组合导航技术
环境中的电磁场主要影响植保无人机的导航系统,确定环境中存在一定强度的电磁场就要进一步考虑植保无人机的导航方式.现阶段植保无人机的组合导航主要采用RTK测向技术和GPS/INS导航系统,可将我国自主研发的北斗导航系统弥补当前植保无人机组合导航系统存在的不足.未来植保无人机必然要配置多种方式进行导航,通过优化滤波算法增加组合导航因子,可使植保无人机不再依赖于某一导航系统,即使其中某个导航系统不能正常工作,也不会影响植保无人机的正常导航.同时,通过运用多传感器技术、神经网络技术、模糊控制技术、自适应技术和现代控制理论等技术,可使植保无人机能自动切换到与之相适应的导航方式,以应对复杂的作业环境.智能组合导航技术的实现将进一步提高植保无人机作业的可靠性和智能化程度,减少植保无人机受到的电磁干扰.
4.3 抗电磁干扰评估系统开发
电磁干扰是个比较专业的问题,应用场景不一样研究手段也有差别.检测常用的4个国家标准,即静电放电抗扰度试验、射频电磁场辐射抗扰度试验、工频磁场抗扰度试验及脉冲磁场抗扰度试验,除了工频磁场抗扰度试验可用于研究磁场对植保无人机的影响,其他都是针对高频且测试手段单一,并不适用于植保无人机的应用场景.所以,亟需开发一个专门评估植保无人机抗电磁干扰性能的系统,包括研究电场、磁场、无线电在内的不同电磁干扰对植保无人机飞行安全的影响.通过系统测试,可以预测出植保无人机的安全范围.在此基础上,通过抗电磁干扰技术进一步提升植保无人机的安全可靠性,同时将改善的植保无人机再次放到系统中进行测试,这样可进一步增大植保无人机作业的安全范围.抗电磁干扰评估系统的实现,将对植保无人机的安全飞行作业提供重要参考.
4.4 植保无人机失效弥补技术
植保无人机除了要考虑抗电磁干扰问题,也要考虑无人机失效后可控的问题.例如,在高压输电线附近失控发生碰撞不仅损坏植保无人机,可能还会造成输电线路损毁或者大范围停电,对电网造成的损失将远远大于植保无人机自身的价值.对于这种情况可通过发射一定的电磁干扰信号将失控的植保无人机引导回安全区域,防止发生二次灾害,这方面国内外也有较多研究,但目前民用无人机还未涉及.植保无人机失效弥补技术的实现,将进一步减少植保无人机失效后的破坏程度,有力保障植保作业附近的人身财产安全.
5 结论
目前,与军用无人机、电力巡检无人机相比,植保无人机抗电磁干扰技术十分脆弱.随着植保无人机大规模应用工作的推进及田间飞行环境的日益复杂化,深入研究植保无人机抗电磁干扰技术的迫切性不容忽视.加深对无人机抗电磁干扰技术的理解,将为植保无人机提供更可靠的设计方案,为植保无人机抗电磁干扰技术的有序发展提供参考,中国必将在航空植保抗电磁干扰方面取得突破,将有利于精准农业航空抗电磁干扰技术的应用,有利于早日实现安全的农业植保要求.
参考文献
[1] Shulin Yang,Xiaobing Yang,Jianyou Mo.The application of unmanned aircraft systems to plant protection in China[J].Transactions of the Chinese Society of Agricultural Engineering,2018,19(2):278-292.
[2] 陈盛德,兰玉彬,李继宇,等.航空喷施与人工喷施方式对水稻施药效果比较[J].华南农业大学学报,2017,38(4):103-109.
[3] 农业部南京农业机械化研究所.NY/T3213-2018植保无人飞机质量技术评价规范[S].北京:中国农业出版社,2018.
[4] 梁红.某型无人机测控系统的电磁干扰抑制设计[D].西安:西安电子科技大学,2011.
[5] 薛艳峰.某型无人机飞行安全控制系统研究与实现[D].南京:南京航空航天大学,2013.
[6] 卢育中.小型飞行器复杂电磁环境下的电磁干扰耦合及防护研究[D].西安:西安电子科技大学,2013.
[7] 郑生全,邓峰,王冬冬,等.电子设备和系统射频通道高功率微波电磁脉冲场-路综合防护方法综述[J].中国舰船研究,2015,10(2):7-14.
[8] 程二威,陈亚洲,刘卫东,等.无人机外壳屏蔽效能测试方法[J].强激光与粒子束,2017,29(11):55-60.
[9] Wang E,Zhang S,Zhang Z.Research on Composite Material UAV Low-Cost Avionics System Prototype[C]//2012 8th International Conference on Wireless Communications,Networking and Mobile Computing.IEEE,2013:672-1348.
[10] 李鸿祥.无人机辐射骚扰、辐射抗扰度的检验[D].哈尔滨:黑龙江大学,2017.
[11] 郭敏.一不小心成了中国电力行业最大的无人机供应商,但曹飞的理想是推动整个产业变革[EB/OL].2018-03-26.http://h-s.blog.csdn.net.forest.vpn358.com/YMPzUELX3AIAp7Q/article/ details/79693917.
[12] 孙阳,李鲁,王蔚,等.特高压输电线路巡检无人机安全技术探讨[J].山东电力技术,2017,44(2):15-19.
[13] 白雪琛.无人机多余度飞行控制系统设计与应用研究[D].杭州:浙江大学,2017.
[14] 王道彬,陈怀民,康芳,等.三余度飞控系统余度管理算法设计与实现[J].计算机测量与控制,2007,15(11):1621-1623.
[15] 马秋瑜,吴成富,陈怀民,等.基于PC104的三余度飞控计算机同步算法的设计与实现[J].测控技术,2007,26(3):62-64.
[16] 潘计辉,张盛兵,张小静,等.无人机容错飞行控制系统研究与应用[J].计算机测量与控制,2013,21(9):2468-2470.
[17] 雷金奎,原丹丹,李海生.基于ARM的双冗余微小型无人机飞行控制系统的设计[J].电子设计工程,2016,24(1):162-164,168.
[18] ZHANG X L,Li H S,YUAN D D.Dual Redundant Flight Control Syst -em Design for MicrominiatureUA-V[C]//2nd International Conference on Electrical,Computer Engineering and Electronics,2015:785-791.
[19] 吴为为.无人靶机飞行控制系统余度技术研究[D].南京:南京航空航天大学,2012.
[20] 王琴.飞行控制计算机余度管理与总线通信技术研究[D].南京:南京航空航天大学,2012.
[21] 周小超.无人机非相似余度飞控计算机系统设计与研究[D].南京:南京航空航天大学,2013.
[22] 吕迅�f,姜斌,陈欣,等.无人机容错飞行控制计算机体系结构研究[J].系统工程与电子技术,2016,38(11):2586-2597.
[23] 陈军花.基于FlexRay的三余度飞行控制计算机设计[D].南京:南京航空航天大学,2016.
[24] 袁燎原.飞行控制系统传感器信息融合与容错方法研究[D].西安:西北工业大学,2015.
[25] Heredia G,Ollero A.Detection of sensor faults in small helicopter UAVs using observer/Kalman filter identification[J].Mathematical Problems in Engineering,2011,2011(3):1-20.
[26] D'Amato E,Mattei M,Mele A,et al.Fault tolerant low cost IMUS for UAVs[C]// IEEE International Workshop on Measurement & Networking.IEEE,2017:136-141.
[27] VitanovI,Aouf N.Fault diagnosis for MEMS INS using unscented Kalman filter enhanced by Gaussian process adaptation.[C]//Adaptive Hardware & Systems.IEEE,2014 :120-126.
[28] Gururajan S,Fravolini M L,Chao H,et al.Performance evaluation of neural network based approaches for airspeed Sensor Failure Accommodation on a small UAV[C]// Control & Automation.IEEE,2013:603-608.
[29] 池程芝,章卫国,高亚奎,等.基于解析余度的机载维护系统故障诊断方法[J].计算机测量与控制,2011,19(7):1552-1554,1557
[30] 包国宁.无人机余度飞行控制系统研究[D].厦门:厦门大学,2017.
[31] 零度智控(北京)智能科技有限公司.双子星飞控(天途农业版)用户手册V1.0[EB/OL].2015-05-07.
[32] 深圳市大疆创新科技有限公司.A3/A3Pro用户手册[EB/OL].2017-08-25.http://h-s.dl.djicdn.com.forest.vpn358.com/downloads/a3/ 20170825/A3A3Pro_User_manual_cn_v1.4.pdf.
[33] 周建民,康永,刘蔚.无人机导航技术应用与发展趋势[J].中国电子科学研究院学报,2015,10(3):274- 277,286.
[34] 陈智超.基于MEMS/GPS组合导航的无人机导航系统研究[D].哈尔滨:哈尔滨工程大学,2016.
[35] 裴信彪.新型多旋翼无人机的低成本组合导航与稳定控制[D].长春:中国科学院大学中国科学院长春光学精密机械与物理研究所,2018.
[36] Liang Y,Jia Y,IsiKVeren A.New fault-tolerant federated Kalman filters for integrated navigation[J].Aircraft Engineering and Aerospace Technology,2018,90(1):65-73.
[37] Liu B,Mu R,Zhang X,et al.MIMU/GNSS Tightly-Coupled Covariance Shaping Adaptive Filtering Method for UAV[C]// International Conference on Automation,2017:594-601.
[38] Weixiu Y,Liang W,Xiaoyun W,et al.Decoupled Kalman filter based on SINS/GPS integrated navigation[C]//Electronic Measurement & Instruments (ICEMI),13th IEEE International Conference on.IEEE,2017:400-405.
[39] 侯俊,朱长青,阎海峰,等.Sage-Husa随机加权无迹卡尔曼滤波及其在导航中的应用[J].导航定位学报,2014,2(1):77-81.
[40] Zhou Y,Wan J,Li Z,et al.GPS/INS integrated navigation with BP neural network and Kalman filter[C]//Robotics and Biomimetics (ROBIO),2017 IEEE International Conference on.IEEE,2017:2515-2520.
[41] 唐泽亮.无人机电力巡线系统的设计与仿真[D].广州:广东工业大学,2017.
[42] Zhai Y,Zhao H,Zhao M,et al.Design of Electric Patrol UAVs Based on a Dual Antenna System[J].Energies,2018,11(4):866.
[43] Consoli A,Ayadi J,Bianchi G,et al.A multi-antenna approach for UAV's attitude determination[C]// Metrology for Aerospace (MetroAeroSpace),IEEE,2015:401-405.
[44] 昂海松.无人机系统概念和关键技术[J].无人系统技术,2018,1(1):66-71.
[45] Shuxia Guo.Simulation of dynamic electromagnetic interference environment for Unmanned Aerial Vehicle data link[J].中国通信,2013,10(7):19-28.
[46] 张冬晓,陈亚洲,田庆民,等.无人机副遥控系统连续波电磁辐照机理[J].强激光与粒束,2015,27(10):189-195.
[47] Chen Y,Zhang D,Cheng E,et al.Investigation on susceptibility of UAV to radiated IEMI[C]//2018 IEEE International Symposium on Electromagnetic Compatibility and 2018 IEEE Asia-Pacific Symposium on Electromagnetic Compatibility (EMC/APEMC).IEEE,2018:718-722.
[48] 刘屹巍,朴海音,肖林,等.无人机数据链抗干扰技术综述[J].飞机设计,2017,37(6):13-16,21.
[49] 兰玉彬.无人机的农业应用[J].紫光阁,2017(1):86.
[50] 张海艳,兰玉彬,文晟,等.植保无人机水稻田间农药喷施的作业效果[J].华南农业大学学报,2019,40(1):116-124.
[51] 胡红岩,任相亮,马小艳,等.棉花脱叶剂的植保无人机喷施技术[J].中国棉花,2018,45(11):43-44.
[52] 蒙艳华,兰玉彬,李继宇,等.单旋翼油动植保无人机防治小麦蚜虫参数优选[J].中国植保导刊,2017,37(12):66-71,74.
[53] 董云哲,李君兴,史云天,等.多旋翼电动无人机玉米植保作业试验分析[J].农业与技术,2015,35(23):40-41.
[54] 中国电力科学研究所.DL/T5118-2010.农村电力网规划设计导则[S].北京:中国电力出版社,2011.
[55] 吴泽琼.各场所高压线的标准规[[EB/OL].2017-09-26.http://h-s.wenku.baidu.com.forest.vpn358.com/view/6d3bd6e48ad63186bc eb19e8 b8 f67c1cfbd6ee71.html.
[56] 中国电力企业联合会.GB50545-2010 110KV~750KV架空输电线路设计规范[S].北京:人民出版社,2011.
[57] 彭湃.基于有限元和模拟电荷法的输电线路工频电磁场的数值计算与研究[D].广州:广东工业大学,2016.
[58] 王焘荣.电力检修无人机避障策略研究[D].成都:西南石油大学,2017.